“The future depends on what you do today.”
Gandhi
Gewichtsbelastungsplattform & Laserpistole
Dieses interaktive therapeutische System wurde entwickelt, um durch spielerische Aktivitäten eine korrekte Stehhaltung zu fördern. Die Idee ist, dass Julian eine gleichmäßige Gewichtsverteilung zwischen beiden Füßen beibehält; wenn eine ausreichende Symmetrie erreicht ist, aktiviert das System drahtlos eine Laserpistole. Wird eine asymmetrische Haltung erkannt, wird die Pistole deaktiviert, bis eine Korrektur erfolgt.
Das System besteht aus drei Hauptkomponenten: einer druckempfindlichen Stehplattform, einer drahtlos gesteuerten Laserpistole und einem Ziel.

Plattform
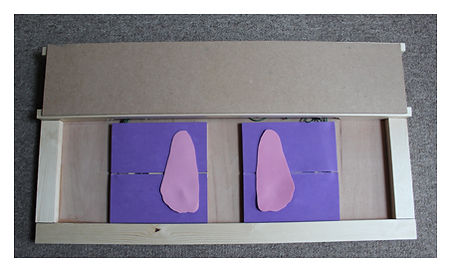
Die Plattform überwacht Julians bilaterale Gewichtsverteilung, indem sie den plantaren Druck mit acht integrierten Kraftsensoren misst. Eine korrekte Stehhaltung wird als nahezu gleichmäßige Belastung zwischen dem linken und rechten Bein definiert. Die Plattform verfügt über einen benutzerdefinierten Toleranzwert, um natürliche Haltungsschwankungen zu berücksichtigen.
Strukturell besteht die Plattform aus zwei verschiebbaren, unabhängig montierten Fußplatten, die jeweils mit vier Hochleistungssensoren im Vorfuß- und Fersenbereich ausgestattet sind. Diese Sensoren messen kontinuierlich die relative Belastungssymmetrie zwischen beiden Füßen.
Das System vergleicht die Ausgaben jeder Sensorgruppe eines Fußes mit der entsprechenden Gruppe des gegenüberliegenden Fußes. Liegt die berechnete Abweichung innerhalb eines benutzerdefinierten akzeptablen Schwellenwerts, aktiviert die Plattform drahtlos die Laserpistole.
Um individuelle Unterschiede in der Haltungskontrolle zu berücksichtigen, verfügt die Plattform über ein hardwarebasiertes Toleranzeinstellungsrad. Dieses Rad modifiziert die zulässige Druckdifferenz zwischen den Gliedmaßen im Bereich von 10 % (strengste Einstellung) bis 50 % (lockerste Einstellung). Zum Beispiel kann bei der 50 %-Einstellung eine Druckgruppe eines Fußes bis zu doppelt so viel Belastung wie die des anderen Fußes registrieren und dennoch als „ausgewogen“ gelten.
Nur wenn die Echtzeit-Gewichtsverteilung innerhalb des ausgewählten Schwellenwerts bleibt, aktiviert das System drahtlos den Aktivierungskreis der Laserpistole.
Drahtlose Kommunikation zwischen Plattform und Laserpistole
Die drahtlose Kommunikation zwischen der Plattform und der Laserpistole erfolgt über zwei Series 2 XBee-Module, die in einer unidirektionalen Konfiguration betrieben werden. In der aktuellen Implementierung des Laserpistolenspiels fungiert die Plattform als Sender, der bei Validierung der korrekten Haltung periodisch Aktivierungssignale an die Laserpistole sendet.
Laserpistole
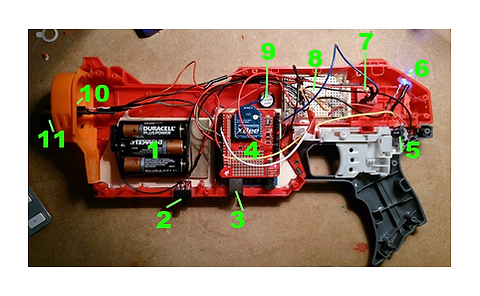
Sehr zum Missfallen der Jungen habe ich den Mechanismus einer Nerf Mega Blaster zerlegt. Meine Hauptsorge galt der Sicherheit, daher enthält die Elektronik der Pistole drei zentrale Sicherheitsfunktionen, um einen sicheren Betrieb zu gewährleisten:

-
Die Laserpistole ist immer AUS, es sei denn, die Plattform aktiviert sie.
-
Vor der Plattform befindet sich ein Bewegungssensor, der den Laser ausschaltet, wenn eine Bewegung zwischen dem Ziel und der Plattform/Laser erkannt wird.
-
Beim Start wird die Pistole kalibriert, um den Laser auszuschalten, wenn sie sich vom Ziel abwendet. Dies wird durch einen Ultraschall-Näherungssensor in der Pistole erreicht, der die Entfernung zum Ziel misst. Da die Größe des Ziels bekannt ist, berechnet die Pistole die Hypotenuse der Entfernung zum Ziel. Wenn der Ultraschallsensor anschließend eine Entfernung misst, die größer als dieser ursprüngliche Hypotenusenwert ist, wird der Laser deaktiviert. Da Julian jedoch viel kleiner als die Entfernung zum Ziel ist, befindet sich zusätzlich ein Beschleunigungsmesser in der Pistole, der den Laser deaktiviert, wenn der akzeptable Neigungswinkel der Pistole nach unten überschritten wird.
Verwendung der Laserpistole
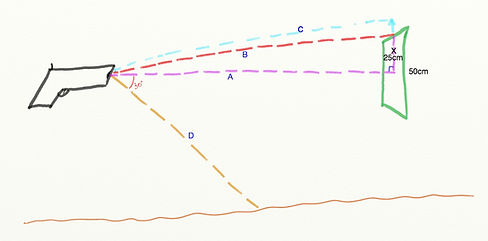
1) Die Pistole wird eingeschaltet und auf die Mitte des Ziels zur Kalibrierung gerichtet.
2) Der Ultraschall-Näherungssensor bestimmt die Entfernung (A) zum Ziel.
3) B wird unter Verwendung des Satzes des Pythagoras berechnet.
4) Von diesem Punkt an, wenn der Ultraschallsensor eine Entfernung zur Wand misst, die größer als B ist (z. B. C), wird der Laser deaktiviert.
5) Gleichzeitig mit der Bestimmung der Ultraschallentfernung (A) in Schritt 2 setzt der Beschleunigungsmesser seine X-Achse auf 0 Grad.
6) Der Beschleunigungsmesser überprüft kontinuierlich den Neigungswinkel nach unten und deaktiviert den Laser, wenn dieser 30 Grad überschreitet.
7) Der Laser wird NUR aktiviert, wenn alle vier der folgenden Bedingungen erfüllt sind:
• Die Plattform sendet ein „Bereit-zum-Schießen“-Signal an die Pistole.
• Die Entfernung zur Wand ist kleiner oder gleich dem ursprünglich berechneten Hypotenusenwert.
• Der Winkel der Pistole ist größer als -30 Grad.
• Es gibt keine Bewegung vor der Plattform.
Komponenten der Laserpistole
-
3 x AA-Batterien
-
Ein-/Ausschalter
-
USB-Zugang
-
Arduino Uno Rev3 / Sparkfun Xbee Shield / XBee Series 2
-
Momenttaster für den Abzug (Umschalten ein/aus)
-
LED zur Anzeige der Schussbereitschaft
-
Beschleunigungsmesser
-
Kabelverbindungen
-
Lautsprecher
-
Roter Laser
-
Ultraschallsensor
Schießscheibe
Der erste Prototyp des Zielsystems ist ein stationäres quadratisches Panel, das von einem Arduino Mega 2560 Mikrocontroller gesteuert wird. Es enthält 15 LEDs, von denen jede mit einem entsprechenden Fotowiderstand zur Lichtdetektion gekoppelt ist. Die Punktzahl des Nutzers wird auf einem blauen 4-stelligen 7-Segment-Display ausgegeben, das beim Systemstart auf null zurückgesetzt wird.
Während des Betriebs werden LEDs zufällig für 3 Sekunden aktiviert. Erkennt der jeweilige Fotowiderstand in diesem Zeitfenster einen deutlichen Anstieg der Lichtintensität – was auf einen erfolgreichen Treffer hinweist – erhöht das System die Punktzahl und aktualisiert das Display in Echtzeit.
Zukünftige Versionen des Designs werden bewegliche mechanische Elemente integrieren, die von zwei Servomotoren und einem Schrittmotor angetrieben werden, um eine dynamische Neupositionierung der Zielkomponenten zu ermöglichen. Die Funktion random() wird verwendet, um bestimmte Ziele zu aktivieren, denen jeweils unterschiedliche Punktwerte zugewiesen werden können, um den Spielspaß zu steigern.

Fazit und Überlegungen
Es hat drei Monate gedauert, das Ganze zu bauen – und Julian hasste es nach drei Minuten. Richtig auf der Plattform zu stehen und gleichzeitig zu zielen und zu schießen war einfach zu viel für ihn.
Doch das hat mir eine weitere wertvolle Lektion erteilt: Wie vieles ich als selbstverständlich ansehe!
Ganz umsonst war es aber nicht, denn wir haben die Plattform schließlich in sein Trainingsprogramm integriert. Und sie wurde zur Steuerung der nächsten Version des Laserpistolenspiels verwendet… der Murmelbahn!
Und die liebt er über alles!